




2022
Low-Coupling Hybrid Parallel-Serial-Kinematic Nanopositioner with Nonorthogonal Flexure: Nonlinear Design and Control Journal Article
In: IEEE/ASME Transactions on Mechatronics, vol. 27, iss. 5, pp. 3683-3693, 2022.
Discrete Input-Output Sliding-Mode Control with Range Compensation: Application in High-Speed Nanopositioning Proceedings Article
In: American Control Conference, June 8-11, 2022.

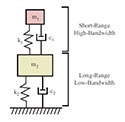
Long-Range Low-Coupling Dual-Stage Nanopositioning: Design and Control for High-Speed Atomic Force Microscopy PhD Thesis
2022.
2021

Closed-loop Range-Based Control of Dual-Stage Nanopositioning Systems Journal Article
In: IEEE/ASME Transactions on Mechatronics, vol. 26, iss. 3, pp. 1412-1421, 2021.
2020
Analysis and Experimental Comparison of Range-based Control for Dual-Stage Nanopositioners Journal Article
In: Mechatronics, Vol. 69, pp. 102371, 2020, 2020.
Spatial-Temporal Trajectory Redesign for Dual-Stage Nanopositioning Systems with Application in AFM Journal Article
In: IEEE/ASME Trans. on Mechatronics, vol. 25, no. 2, pp. 558 - 569, 2020.

Improved Linear Quadratic Tracking Control of Dual-Stage Nanopositioning Systems through a Cascading Structure Conference
American Control Conference (Accepted, forthcoming), 2020.

Multi-time Scale Control of Dual-Stage Nanopositioning Systems Proceedings Article
In: 21st World Congress of the International Federation of Automatic Control (Under review), Berlin, Germany, July 12-17,, 2020.
2019
Robust Sliding-Mode Control for Dual-Stage Nanopositioning Systems Proceedings Article
In: American Control Conference (Accepted, forthcoming), Invited session: Precision Mechatronics, Philadelphia, PA, July 10-12, 2019, 2019.
2018

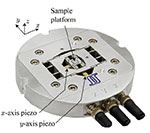
A 3D-Printed 3-DOF Tripedal Microrobotic Platform for Unconstrained and Omnidirectional Sample Positioning Journal Article
In: International Journal of Intelligent Robotics and Applications, vol. 2, no. 4, pp. 425-435, 2018.

Development of a 3-DOF tripedal stick-slip microrobotic mobile platform for unconstrained, omnidirectional sample positioning Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Atlanta, GA, October 1-3, 2018.
2017
Spatial filter design for dual-stage systems Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Tysons Corner, Virginia, USA, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.

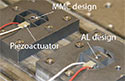
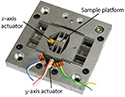
Design of a Dual-Stage, Three-Axis Hybrid Parallel-Serial-Kinematic Nanopositioner with Mechanically Mitigated Cross-Coupling Proceedings Article
In: Invited session on Design & Control of Micro/Nano Precision Mechatronic Systems, IEEE Int. Conf. on Advanced Intelligent Mechatronics, Munich, Germany, July 3-7, 2017, 2017.
Spatial-Temporal Trajectory Redesign for Dual-Stage Nanopositioning Systems Proceedings Article
In: Invited session on Design & Control of Micro/Nano Precision Mechatronic Systems, IEEE Int. Conf. on Advanced Intelligent Mechatronics, Munich, Germany, July 3-7, 2017, 2017.
2016

High-speed AFM through non-raster scanning and high speed actuation Proceedings Article
In: Biophysical Society Annual Meeting, Los Angeles, CA, February 27 - March 2. Poster presentation., 2016.

Master-slave control with hysteresis inversion for dual-stage nanopositioning systems Proceedings Article
In: American Control Conference (Accepted), Boston MA, July 6-8, 2016, 2016.
Design of high-speed nanopositioning systems, Fundamentals and Applications of Nanopositioning Technologies Book Chapter
In: Ru, C.; Liu, X.; Sun, Y. (Ed.): Springer, 2016.

Position sensors, in Fundamentals and Applications of Nanopositioning Technologies Book Chapter
In: X. Liu C. Ru,; Sun, Y. (Ed.): Fundamentals and Applications of Nanopositioning Technologies (Under review), Springer, 2016.
Tracking control for nanopositioning systems, in Fundamentals and Applications of Nanopositioning Technologies Book Chapter
In: Ru, C.; Liu, X.; Sun, Y. (Ed.): Fundamentals and Applications of Nanopositioning Technologies, Springer, 2016.
2015
Low-order damping and tracking control for scanning probe systems Journal Article
In: Mechatronics, Frontiers in Mechanical Engineering, vol. 1, pp. Article 14, 2015.
Low-order Continuous-time Robust Repetitive Control: Application in Nanopositioning Journal Article
In: Mechatronics, vol. 30, pp. 231–243, 2015.
2014
Design, modeling, and control of nanopositioning systems Book
Springer, New York, 2014, ISBN: 3319066161.

Range-based control of dual-stage nanopositioning systems Journal Article
In: Review of Scientific Instruments, vol. 85, no. 4, pp. 045003 (6 pages), 2014.

Analog robust repetitive control for nanopositioning Proceedings Article
In: 19th World Congress of the International Federation of Automatic Control, 24-29 August 2014, Cape Town, South Africa (Forthcoming), 2014.
2013
An experimental comparison of PI, inversion, and damping control for high performance nanopositioning Proceedings Article
In: American Control Conference, 2013.
Mechanical design and control for high-speed nanopositioning: serial-kinematic nanopositioners and repetitive control for nanofabrication Journal Article
In: IEEE Control Systems Magazine (In press), Special Issue on Dynamics and Control of Micro and Naoscale Systems, vol. 33, no. 6, pp. 86 – 105, 2013.
2012
University of Nevada, Reno, Reno, Nevada, 2012.

Robust damping PI repetitive control for nanopositioning Proceedings Article
In: American Control Conference, 2012.
Overcoming the speed limitations of constant-force mode AFM Proceedings Article
In: Seeing at the Nanoscale 2012, 2012.

Accounting for hysteresis in repetitive control design: nanopositioning example Journal Article
In: Automatica, vol. 48, no. 8, pp. 1751 – 1758, 2012.

An experiment for teaching students about control at the nanoscale Journal Article
In: IEEE Cont. Syst. Mag., vol. 32, no. 1, pp. 66–68, 2012.
Design and control of a three-axis serial-kinematic high-bandwidth nanopositioner Journal Article
In: IEEE/ASME Trans. Mechatronics, vol. 17, no. 2, pp. 356 – 369, 2012.
Dual-stage repetitive control with Prandtl-Ishlinskii hysteresis inversion for piezo-based nanopositioning Journal Article
In: Mechatronics, vol. 22, pp. 271 – 281, 2012.
Flexure design using metal matrix composite materials: nanopositioning example Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA), 2012.

Invited Review: High-speed flexure-guided nanopositioning: mechanical design and control Issues Journal Article
In: Review of Scientific Instruments, vol. 83, no. 12, pp. 121101, 2012.
Spatial-temporal control of dual-stage nanpositioners Proceedings Article
In: IEEE Control and Decision Conference, 2012.
2011

Repetitive control for hysteretic systems: theory and application in piezo-based nanopositioners PhD Thesis
Univesity of Nevada, Reno, 2011.

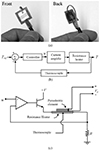
A compact ultra-fast vertical nanopositioner for improving SPM scan speed Journal Article
In: Rev. Sci. Instr., vol. 82, pp. 123703, 2011.
Cyclic Energy harvesting from pyroelectric materials Journal Article
In: IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, vol. 58, no. 1, pp. 10–17, 2011.
Repetitive control design for piezoelectric actuators Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), 2011.
2010
Application of an Inverse-Hysteresis Iterative Control Algorithm for AFM Fabrication Masters Thesis
University of Nevada, Reno, Reno, Nevada, 2010.
University of Nevada, Reno, Reno, Nevada, 2010.
Performance of thin piezoelectric materials for pyroelectric energy harvesting Journal Article
In: Journal of Intelligent Material Systems and Structures, Special issue of a selection of papers from the first ASME Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS 2008) Symposium , vol. 21, pp. 243 – 249, 2010.

Design, characterization, and control of a monolithic three-axis high-bandwidth nanopositioning stage Proceedings Article
In: American Control Conference, Special Invited Session on Advances in Actuation for Nanopositioning and Scanning Probe Systems, pp. 4949 – 4956, 2010.
Dual-stage repetitive control for high-speed nanopositioning Proceedings Article
In: IFAC Symposium on Mechatronic Systems and ASME Dynamic Systems and Control Conference (DSCC), Invited session on Micro- and Nanoscale Dynamics and Control, 2010.
High performance nanopositioning with integrated strain and force feedback Proceedings Article
In: IFAC Symposium on Mechatronic Systems and ASME Dynamic Systems and Control Conference (DSCC), Invited Session on Micro- and Nanoscale Dynamics and Control, 2010.

Integrated strain and force feedback for high performance control of piezoelectric actuators Journal Article
In: Sensors and Actuators: A. Physical, vol. 161, no. 1-2, pp. 256 – 265, 2010.

Measurement and control for high-speed sub-atomic positioning in scanning probe microscopes Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA2010), Invited workshop, May 3-8, 2010.

Teaching modules on modeling and control of piezoactuators for undergraduate dynamics and control and mechatronics courses Journal Article
In: IEEE Trans. Education, vol. 53, no. 3, pp. 372 – 383, 2010.

Ultra-fast dual-stage vertical positioning for high performance SPMs Proceedings Article
In: American Control Conference, Special Invited Session on Advances in Actuation for Nanopositioning and Scanning Probe Systems, pp. 4975 – 4980, 2010.
2009
Repetitive control with Prandtl-Ishlinskii hysteresis inverse for piezo-based nanopositioning Proceedings Article
In: American Control Conference, Invited Session on Advances in Control of Nanopositioning and SPM Systems, pp. 301 - 306, 2009.

A review of feedforward control approaches in nanopositioning for high speed SPM Journal Article
In: ASME J. Dyn. Syst. Meas. and Cont., vol. 131, no. 6, pp. 061101 (19 pages), 2009.
Design and analysis of discrete-time repetitive control for scanning probe microscopes Journal Article
In: ASME J. Dyn. Syst. Meas. and Cont., vol. 131, pp. 061103 (12 pages), 2009.

Feedforward control of piezoactuators in atomic force microscope systems: inversion-based compensation for dynamics and hysteresis Journal Article
In: IEEE Cont. Syst. Mag., Special Issue on Hysteresis, vol. 29, no. 1, pp. 70 – 82, 2009.

High-speed serial-kinematic AFM scanner: design and drive considerations Journal Article
In: Asian Journal of Control, Special issue on Advanced Control Methods for Scanning Probe Microscopy Research and Techniques, vol. 11, no. 2, pp. 144 – 153, 2009.
2008
Energy harvesting via pyroelectric effect using PZT Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems, 2008.

Charge drives for scanning probe microscope positioning stages Journal Article
In: Ultramicroscopy, vol. 108, pp. 1551–1557, 2008.

Optimal seek-trajectory design for dual-stage systems Journal Article
In: IEEE Trans. Cont. Sys. Tech., vol. 16, no. 5, pp. 869 – 881, 2008.

Modeling and control of smart actuators: integrating nano/bio technology into the ME curriculum Proceedings Article
In: ASEE Annual Conference and Exposition, 2008.

Low-cost noncontact infrared sensors for sub-micro-level position measurement and control Journal Article
In: IEEE/ASME Trans. on Mechatronics, vol. 13, no. 6, pp. 700 – 709, 2008.
Hysteresis inverse iterative learning control of piezoactuators in AFM Proceedings Article
In: 17th IFAC World Congress, Invited Session on Dynamics and Control of Micro- and Nanoscale Systems, 2008.
Discrete-time phase compensated repetitive control for piezoactuators in scanning probe microscopes Proceedings Article
In: ASME Dynamic Systems and Control Conference, Invited Session on Dynamics Modeling and Control of Smart Actuators, pp. 1325 – 1332, 2008.
Evaluation of charge drives for scanning probe microscope positioning stages Proceedings Article
In: American Control Conference, Invited session on Advanced Mechanism Design, Modeling, and Control of SPMs, pp. 2028 – 2033, 2008.
High-speed serial-kinematic AFM scanner: design and drive considerations Proceedings Article
In: American Control Conference, Invited Session on Modeling and Control of SPM, pp. 3188 – 3193, 2008.
2007
A collaborative approach to teach modeling and control of smart actuators in the mechanical engineering curriculum Proceedings Article
In: ASME International Mechanical Engineering Congress and Exposition, 2007.

Feedback-linearized inverse feedforward for creep, hysteresis, and vibration compensation in AFM piezoactuators Journal Article
In: IEEE Trans. Cont. Syst. Tech., vol. 15, no. 5, pp. 927 – 935, 2007.
2006
The design of a high-voltage charge-feedback piezo-amplifier Proceedings Article
In: Actuator 2006 Conference, pp. 353 – 355, 2006.
Hysteresis characterization using charge-feedback control for LIPCA a device Proceedings Article
In: SPIE Smart Structures and Materials and NDE for Health Monitoring and Diagnostics, 2006.

Design of hysteresis-compensating iterative learning control for piezo positioners: application to atomic force microscopes Journal Article
In: Mechatronics, vol. 16, no. 3--4, pp. 141 – 158, 2006.
2004
Iterative learning control of piezo positioners for long-range SPM-based nanofabrication Proceedings Article
In: The 3rd IFAC Symposium on Mechatronic Systems, 2004.
University of Washington, 2004.
Control issues in high-speed AFM for biological applications: collagen imaging example Journal Article
In: Asian Journal of Control, Special issue on Advances in Nanotechnology Control, vol. 6, no. 2, pp. 164-178, 2004.
2003

Iterative feedforward compensation of hysteresis in piezo positioners Proceedings Article
In: IEEE 42nd Conference on Decision and Controls, Invited session on Nanotechnology: Control Needs and Related Perspectives, pp. 2626 - 2631, 2003.
2002
Continuous- and discrete-time state-space modeling (a contributed chapter) Book Chapter
In: Bishop, R. (Ed.): The CRC Mechatronics Handbook, pp. 40-54, The CRC Press, 2002.
Hysteresis, creep, and vibration compensation for piezoactuators: feedback and feedforward control Proceedings Article
In: The 2nd IFAC Conference on Mechatronic Systems, Invited session on Smart Materials and Structures, pp. 283-289, 2002.
