




2026

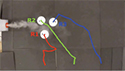
Mobile-robotic Sensor for Estimation and Localization of Multiple Chemical-gas Leaks: A Find- and-Consume Infotaxis Approach Journal Article
In: Robotics and Autonomous Systems, vol. 202, pp. 105431, 2026.

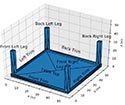
Information-based Supervised Learning of In-proximity Effects for 3D Distance Estimation and Collision Avoidance Journal Article
In: IEEE Robotics and Automation Letters, vol. 11, iss. 5, pp. 5398-5405, 2026.

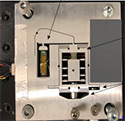
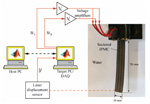
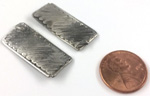
Engineered ionic polymer metal composites as extension sensors: Theory and experiments Journal Article
In: ASME Letters in Dynamic Systems and Control/MECC 2025 Joint Submission, vol. 6, iss. 1, pp. 011003 (6-pages), 2026.
2025
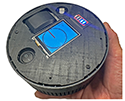
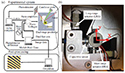
Smart Chemical Sensing Payload for Emergency Response Uncrewed Autonomous Systems Journal Article
In: ASME Journal of Autonomous Vehicles and Systems, vol. 5, iss. 4, no. 041002 (10 pages), 2025.

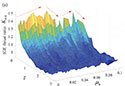
Intelligent Flying Chemical Sensor Network for Gas-leak Localization and Mapping Journal Article
In: ASME Letters in Translational Robotics, vol. 1, iss. 3, pp. 031003 (12 pages), 2025.

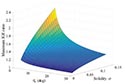
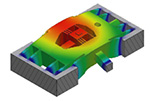
Impact of Surface Roughness on Quasi-Steady In-Ground Effect for Hover-capable Aerial Vehicles Journal Article
In: International Journal of Micro Aerial Vehicles, vol. 17, 2025.

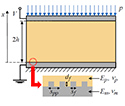
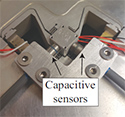
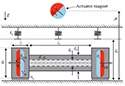
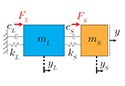
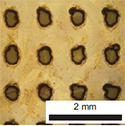
Engineered ionic polymer metal composites (eIPMCs) under dynamic compression loading conditions: theory and experiments Journal Article
In: Smart Materials and Structures, vol. 34, iss. 2, pp. 025048, 2025.
Rotorcraft in-ground effect models in axial and forward flight Journal Article
In: Aerospace Science and Technology, vol. 156, pp. 109748, 2025.
2024

Rapid Airborne Gas-plume Mapping and Source Localization with Feedforward Gas-sensor Dynamics Compensation Journal Article
In: ASME Letters in Dynamic Systems and Control, vol. 4, no. 4, pp. 041002, 2024.

Information-Theoretic Bayesian Inference for Multi-Agent Localization and Tracking of an RF Target with Unknown Waveform Journal Article
In: ASME J. Dyn. Syst. Meas. and Cont., Special Issue on Data-Driven Modeling and Control of Dynamical Systems (https://doi.org/10.1115/1.4066453), vol. 146, iss. 6, pp. 061104, 2024.

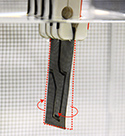
Magnetically-actuated Endoluminal Soft Robot with Electroactive Polymer Actuation for Enhanced Gait Performance Journal Article
In: ASME J. Mechanisms and Robotics (In press), vol. 16, no. 10, pp. 104503, 2024.
2023

Engineered IPMC Sensors: Modeling, Characterization, and Application towards Wearable Postural-tactile Measurement Journal Article
In: Smart Materials and Structures, vol. 33, pp. 015035 (12 pages), 2023.

A Tutorial on Real-Time Computing Issues for Control Systems Proceedings Article
In: American Control Conference, San Diego, CA, May 31-June 2, 2023.
2022

Information-Based Mobile Sensor Network Localization and Tracking of an Uncooperative Target Proceedings Article
In: IEEE Military Communications Conference (MILCOM), November 28 - December 2, Rockville, MD, USA, pp. 490-495, 2022.
Information-Based Mobile Sensor Network Coordination for Localizing and Tracking of an Uncooperative Target Masters Thesis
2022.
Ionic Polymer-Metal Composite Sensors and Actuators for Wearable and Medical Devices Proceedings Article
In: 6th International Conference on Active Materials and Soft Mechatronics (AMSM 2022), October 26-29, 2022, Georgia Tech, Atlanta, Georgia, USA, 2022.
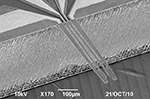
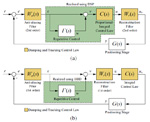
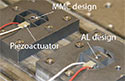
Low-Coupling Hybrid Parallel-Serial-Kinematic Nanopositioner with Nonorthogonal Flexure: Nonlinear Design and Control Journal Article
In: IEEE/ASME Transactions on Mechatronics, vol. 27, iss. 5, pp. 3683-3693, 2022.
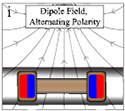
Modeling and Analysis of a Soft Endoluminal Inchworm Robot Propelled by Rotating Magnetic Dipole Fields Journal Article
In: ASME J. of Mechanisms and Robotics, vol. 14, iss. 5, pp. 051002 (11 pages), 2022.

Feedforward Mutual-Information Anomaly Detection: Application to Autonomous Vehicles Journal Article
In: ASME Journal of Autonomous Vehicles and Systems, vol. 2, iss. 4, no. 041003 (7 pages), 2022.

Locomotion and Steering of a Magnetic-electroactive Endoluminal Soft Robot PhD Thesis
2022.
Discrete Input-Output Sliding-Mode Control with Range Compensation: Application in High-Speed Nanopositioning Proceedings Article
In: American Control Conference, June 8-11, 2022.
Bayesian Find-and-Consume Strategy for Mobile Robotic Sensor Networks: Estimating and Localizing Multiple Gas Leaks Masters Thesis
2022.
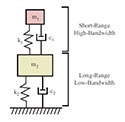
Long-Range Low-Coupling Dual-Stage Nanopositioning: Design and Control for High-Speed Atomic Force Microscopy PhD Thesis
2022.

Surface Roughness Effects on Ionic Polymer-Metal Composite (IPMC) Sensitivity for Compression Loads Proceedings Article
In: SPIE Smart Structures + Nondestructive Evaluation, Long Beach, CA, March 6-10, 2022.
2021
Ionic Polymer Metal Composite Compression Sensors with 3D-Structured Interfaces Journal Article
In: Smart Materials and Structures, vol. 30, no. 12, pp. 125027, 2021.

Manufacturing for the masses: a novel concept for consumer 3D printer networks in the context of crisis relief Journal Article
In: Advanced Intelligent Systems, pp. 202100121, 2021.

Particle swarm optimization for source localization in realistic complex urban environments Journal Article
In: Atmospheric Environment, vol. 262, pp. 118636, 2021.

Near-Optimal Area-Coverage Path Planning of Energy Constrained Aerial Robots with Application in Autonomous Environmental Monitoring Journal Article
In: IEEE Trans. on Automation Science and Engineering, vol. 18, iss. 3, pp. 1453-1668, 2021.
The Effect of Surface Roughness on Quasi-Steady in-Ground Effect for Multirotor Aerial Vehicles Masters Thesis
University of Utah, 2021.

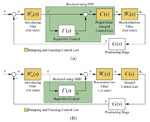
Closed-loop Range-Based Control of Dual-Stage Nanopositioning Systems Journal Article
In: IEEE/ASME Transactions on Mechatronics, vol. 26, iss. 3, pp. 1412-1421, 2021.
![The American Control Conference [Conference report]](http://www.kam.k.leang.com/academics/wp-content/uploads/2021/10/2021_ACCreport.jpg)
The American Control Conference [Conference report] Journal Article
In: IEEE Control Systems Magazine, vol. 41, no. 1, pp. 82-86, 2021.
2020

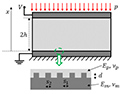
Quasi-Steady In-Ground-Effect Model for Single and Multi-Rotor Aerial Vehicles Journal Article
In: AIAA Journal, vol. 58, no. 2, pp. 5318 - 5331, 2020.
Soft Endoluminal Robots Propelled by Rotating Magnetic Dipole Fields Journal Article
In: IEEE Transactions on Medical Robotics and Bionics, vol. 2, no. 4, pp. 598-607, 2020.

Autonomous Light Assessment Drone for Dark Skies Studies Proceedings Article
In: ASME Dynamic Systems and Control Conference (Virtual conference), October 4-7, 2020, 2020.

Decentralized Multi-Agent Information-Theoretic Control for Target Estimation and Localization: Finding Chemical Leaks Journal Article
In: International Journal of Robotics Research, vol. 39, no. 13, pp. 1525 - 1548, 2020.
Image-based Estimation, Planning, and Control for High-speed Flying through Multiple Openings Journal Article
In: International Journal of Robotics Research, Vol. 39, No. 9, pp. 122-1137, 2020, 2020.

Decentralized multi-agent information theoretic target localization and estimation: finding and predicting chemical gas leaks PhD Thesis
University of Utah, 2020.
Ionic Polymer Metal Composite Sensors with Engineered Interfaces (eIPMCs): compression sensing modeling and experiments Proceedings Article
In: 2020.
Analysis and Experimental Comparison of Range-based Control for Dual-Stage Nanopositioners Journal Article
In: Mechatronics, Vol. 69, pp. 102371, 2020, 2020.
Spatial-Temporal Trajectory Redesign for Dual-Stage Nanopositioning Systems with Application in AFM Journal Article
In: IEEE/ASME Trans. on Mechatronics, vol. 25, no. 2, pp. 558 - 569, 2020.

Image-Based Estimation, Planning, and Control of Cable-Suspended Payload for Package Delivery Journal Article
In: IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2698-2705, 2020.

Improved Linear Quadratic Tracking Control of Dual-Stage Nanopositioning Systems through a Cascading Structure Conference
American Control Conference (Accepted, forthcoming), 2020.

Modeling and Control of In-Ground-Effect on Rotorcraft Unmanned Aerial Vehicles PhD Thesis
University of Utah, 2020.

Multi-time Scale Control of Dual-Stage Nanopositioning Systems Proceedings Article
In: 21st World Congress of the International Federation of Automatic Control (Under review), Berlin, Germany, July 12-17,, 2020.
2019

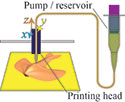
3D-Printing and Machine Learning Control of Soft Ionic Polymer-Metal Composite Actuators Journal Article
In: Nature Scientific Reports, Soft sensors and actuators Collection, vol. 9, pp. 17482 , 2019.
Assembly Planning using a Multi-Arm System for Polygonal Furniture Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019, 2019.

Body-pose Bayesian estimation of a snow-avalanche victim: a method for first responders and/or aerial robots to quickly locate a buried victim Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019, 2019.
Coordinated Bayesian-based Bio-Inspired Plume Source Term Estimation and Source Seeking for Mobile Robots Journal Article
In: IEEE Transactions on Robotics (DOI: 10.1109/TRO.2019.2912520), vol. 35, no. 4, pp. 967-986, 2019.

Dynamic and Aggressive Image-Based Flying in GPS-Denied Environments: Estimation, Motion Planning, and Control PhD Thesis
University of Utah, 2019.
A New Quasi-steady In-Ground Effect Model Rotorcraft Unmanned Aerial Vehicles Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019, 2019.

Gaussian-based Kernel for Multi-Agent Aerial Chemical-Plume Mapping Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019 (Accepted, forthcoming), 2019.

Magneto-electroactive Endoluminal Soft Robots Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019 (Accepted, forthcoming), 2019.

Chemical-source localization using a swarm of decentralized unmanned aerial vehicles for urban/suburban environments Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019, 2019.
Hygroscopic swelling for 4D fabrication of ionic polymer-metal composite soft-robotic devices Masters Thesis
University of Utah, 2019.

Multi-rotor In-Ground-Effect Modeling and Adaptive Nonlinear Disturbance Observer for Closed-loop UAV Control Journal Article
In: ASME J. Dyn. Syst. Meas. and Cont., Special Issue: "Autonomous Mobile Systems" in Memory of Professor J. Karl Hedrick, vol. 141, pp. 071013 (11 pages), 2019.

Autonomous Chemical Sensing Aerial Robot for Urban/Suburban Environmental Monitoring Journal Article
In: IEEE Systems Journal, Vol. 13, No. 3, pp. 3524 - 3535, 2019.

Guest Editorial Focused Section on Soft Actuators, Sensors, and Components (SASC) Journal Article
In: IEEE/ASME Transactions on Mechatronics, Focused Section, Vol. , vol. 24, no. 1, pp. 1-4, 2019.

Open-Sector Rapid Reactive Collision Avoidance: Application in Aerial Robot Navigation Through Outdoor Unstructured Environments Journal Article
In: Robotics and Autonomous Systems, vol. 112, pp. 211-220, 2019.
Robust Sliding-Mode Control for Dual-Stage Nanopositioning Systems Proceedings Article
In: American Control Conference (Accepted, forthcoming), Invited session: Precision Mechatronics, Philadelphia, PA, July 10-12, 2019, 2019.
2018

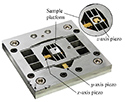
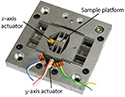
A 3D-Printed 3-DOF Tripedal Microrobotic Platform for Unconstrained and Omnidirectional Sample Positioning Journal Article
In: International Journal of Intelligent Robotics and Applications, vol. 2, no. 4, pp. 425-435, 2018.

Nonlinear Vision-based Observer for Visual Servo Control of an Aerial Robot in GPS-denied Environments Journal Article
In: ASME J. Mechanisms and Robotics, vol. 10, no. 6, pp. 061018, 2018.
Design and control of a micro aerial vehicle powered with resonant inductive wireless power transfer Masters Thesis
University of Utah, 2018.

Development of a 3-DOF tripedal stick-slip microrobotic mobile platform for unconstrained, omnidirectional sample positioning Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Atlanta, GA, October 1-3, 2018.

3D printing, performance characterization, and machine learning control of ionic polymer-metal composite actuators with applications in soft robotics PhD Thesis
University of Utah, 2018.
Near-optimal area coverage path planning for an energy constrained autonomous mobile robot: application to autonomous aerial chemical sensing Masters Thesis
University of Utah, 2018.
Characterization, Modeling, and Feedforward Compensation of Gas Sensor Dynamics for Aerial Robot Chemical Plume Mapping and Swarm-based Localization Masters Thesis
University of Utah, 2018.

Modular design and control of a fully-actuated hexrotor for aerial manipulation applications Journal Article
In: ASME J. Mechanisms and Robotics, vol. 10, no. 4, pp. 041007, 2018.

In: Invited article to the Special Issue on Active Materials and Soft Mechatronics, International Journal of Smart and Nano Materials, vol. 8, no. 4, pp. 144-213, 2018.

Design, Modeling, and Analysis of Inductive Resonant Coupling Wireless Power Transfer for Micro Aerial Vehicles (MAVs) Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA), Brisbane Convention & Exhibition Centre, Australia, May 21-25, 2018, pp. 6104-6109, 2018.
Design, modeling, and gait control of a rolling quadruped (Roll-U-Ped) Masters Thesis
University of Utah, 2018.
2017
Spatial filter design for dual-stage systems Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Tysons Corner, Virginia, USA, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.

Position and Linear Velocity Estimation for Position-Based Visual Servo Control of an Aerial Robot in GPS-Denied Environments Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Tysons Corner, Virginia, USA, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.

Mutual Information Control for Target Acquisition: A Method to Localize a Gas/Chemical Plume Source Using a Mobile Sensor Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC) Tyson Corner, Virginia, USA, October 11-13, 2017, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.

Guest Editorial: Focused Section on Advances in Soft Robotics Journal Article
In: International Journal of Intelligent Robotics and Applications, vol. 1, no. 2, pp. 121 - 123, 2017.

Modeling and Adaptive Nonlinear Disturbance Observer for Closed-Loop Control of In-Ground-Effects on Multi-rotor UAVs Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC) Tyson Corner, Virginia, USA, October 11-13, 2017, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.
Adaptive Vision-Based Leader- Follower Formation Control of Mobile Robots Journal Article
In: IEEE Transactions on Industrial Electronics, vol. 64, no. 4, pp. 2893 - 2902, 2017.

Guidelines for making Ionic Polymer-Metal Composite (IPMC) materials as artificial muscles by advanced manufacturing methods: State-of-the-Art, Book Chapter
In: Bar-Cohen, Yoseph (Ed.): Advances in manufacturing and processing of materials and structures (Under review), CRC Press/Taylor & Francis Group, LLC, 2017.

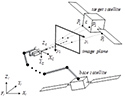
Adaptive-Repetitive Visual-Servo Control of Low-Flying Aerial Robots via Uncalibrated High-Flying Cameras Journal Article
In: Journal of Nonlinear Science, Special issue on robotics: mechanics and control of locomotion, vol. 27, no. 4, pp. 1235-1256, 2017.

Fused Filament 3D Printing of Ionic Polymer-Metal Composites for Soft Robotics Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, Portland, OR, March 26-29, 2017., 2017.

Design of a Dual-Stage, Three-Axis Hybrid Parallel-Serial-Kinematic Nanopositioner with Mechanically Mitigated Cross-Coupling Proceedings Article
In: Invited session on Design & Control of Micro/Nano Precision Mechatronic Systems, IEEE Int. Conf. on Advanced Intelligent Mechatronics, Munich, Germany, July 3-7, 2017, 2017.
Spatial-Temporal Trajectory Redesign for Dual-Stage Nanopositioning Systems Proceedings Article
In: Invited session on Design & Control of Micro/Nano Precision Mechatronic Systems, IEEE Int. Conf. on Advanced Intelligent Mechatronics, Munich, Germany, July 3-7, 2017, 2017.

3D-Printed Ionic Polymer-Metal Composite Soft Crawling Robot Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA), Sands Expo and Convention Centre, Marina Bay Sands in Singapore, May 29 - June 3, 2017, 2017.
Eye-in-Hand Tracking Control of a Free-Floating Space Manipulator Journal Article
In: IEEE Transactions on Aerospace and Electronic Systems, vol. 53, no. 4, pp. 1855 - 1865, 2017.

Repetitive Control Design and Implementation for Periodic Motion Tracking in Aerial Vehicles Proceedings Article
In: American Control Conference May 24-26, Seattle, WA, 2017, 2017.

A Unified Leader-Follower Scheme for Mobile Robots with Uncalibrated On-board Camera Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA), Sands Expo and Convention Centre, Marina Bay Sands in Singapore, May 29 - June 3, pp. 3792 - 3797, 2017.

On-Board Model-Based Automatic Collision Avoidance: Application in Remotely Piloted Unmanned Aerial Vehicles Journal Article
In: Autonomous robots, vol. 41, no. 7, pp. 1539-1554, 2017.
2016
Design and modeling of the dynamic underactuated flying-walking (DUCK) robot Masters Thesis
University of Utah, 2016.

Adaptive Repetitive Visual-Servo Control of a Low-Flying Unmanned Aerial Vehicle with an Uncalibrated High-Flying Camera Proceedings Article
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 9-14, 2016, Daejeon, Korea, pp. 4258 - 4265, 2016.

Study of Improved Pilot Performance using Automatic Collision Avoidance for Tele-operated Unmanned Aerial Vehicles Proceedings Article
In: 2016 IEEE International Symposium on Safety, Security and Rescue Robotics, October 23-27, 2016, EPFL, Lausanne, Switzerland, 2016.

IPMC Manufacturing Techniques: Recent Developments Proceedings Article
In: International Workshop on Active Materials and Soft Mechatronics, KAIST, Daejeon, South Korea, July 7-8, 2016, 2016.
3D Printing of Smart Materials Proceedings Article
In: International Workshop on Active Materials and Soft Mechatronics, KAIST, Daejeon, South Korea, July 7-8, 2016, 2016.

University of Utah, 2016.

IPMCs as EAPs: how to start experimenting with them Book Chapter
In: Springer International Publishing AG (in press), 2016.

High-speed AFM through non-raster scanning and high speed actuation Proceedings Article
In: Biophysical Society Annual Meeting, Los Angeles, CA, February 27 - March 2. Poster presentation., 2016.
Precision feedback and feedforward control of ionic polymer-metal composite actuators Book Chapter
In: Shahinpoor, M. (Ed.): Chapter 11, Royal Society of Chemistry, 2016.

Master-slave control with hysteresis inversion for dual-stage nanopositioning systems Proceedings Article
In: American Control Conference (Accepted), Boston MA, July 6-8, 2016, 2016.

Dynamic underactuated flying-walking (DUCK) robot Proceedings Article
In: 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, pp. 3267 - 3274, 2016.

Characterization of 3D-printed IPMC Actuators Proceedings Article
In: SPIE Smart Structures/NDE, Las Vegas, Nevada, March 20-24, 2016, 2016.
Tracking control for nanopositioning systems, in Fundamentals and Applications of Nanopositioning Technologies Book Chapter
In: Ru, C.; Liu, X.; Sun, Y. (Ed.): Fundamentals and Applications of Nanopositioning Technologies, Springer, 2016.

Position sensors, in Fundamentals and Applications of Nanopositioning Technologies Book Chapter
In: X. Liu C. Ru,; Sun, Y. (Ed.): Fundamentals and Applications of Nanopositioning Technologies (Under review), Springer, 2016.
Design of high-speed nanopositioning systems, Fundamentals and Applications of Nanopositioning Technologies Book Chapter
In: Ru, C.; Liu, X.; Sun, Y. (Ed.): Springer, 2016.
2015
Design and Analysis of Scanning Probe Microscopy Cantilevers with Microthermal Actuation Journal Article
In: IEEE Journal of Microelectromechanical Systems, vol. 24, no. 6, pp. 1768 - 1781, 2015.
Fused filament 3D printing of ionic polymer-metal composites (IPMCs) Journal Article
In: Smart Materials and Structures, vol. 24, pp. 125021 (11 pages), 2015.
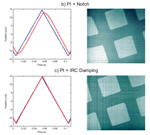
Low-order damping and tracking control for scanning probe systems Journal Article
In: Mechatronics, Frontiers in Mechanical Engineering, vol. 1, pp. Article 14, 2015.
Low-order Continuous-time Robust Repetitive Control: Application in Nanopositioning Journal Article
In: Mechatronics, vol. 30, pp. 231–243, 2015.

Stochastic automatic collision avoidance for tele-operated unmanned aerial vehicles Proceedings Article
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), September 28 - October 02, pp. 4818-4825, Hamburg, Germany, 2015.

A Micro Spherical Rolling and Flying Robot Proceedings Article
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), September 28 - October 02, Hamburg, Germany, 2015.

Fused Filament Additive Manufacturing of Ionic Polymer-Metal Composite Soft Active 3D Structures Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), September 21-23, 2015 in Colorado Springs, Colorado., Colorado Springs, Colorado, 2015, (Jim Carrico and Nick Traeden were winners of the 2015 SMASIS Conf. Best Student Paper Award!).

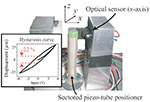
Slender tube-shaped and square rod-shaped IPMC actuators with integrated sensing for soft mechatronics Journal Article
In: Meccanica, vol. 50, no. 11, pp. 2781-2795, 2015.
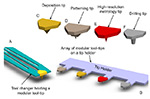
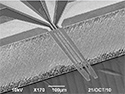
Rapid fabrication of modular nanoscale tool-tips for nano and micro manufacturing Proceedings Article
In: 4M/ICOMM 2015 Conference (Accepted), 2015.
2014
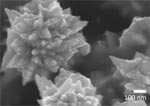
Nanothorn electrodes for ionic polymer-metal composite artificial muscles Journal Article
In: Scientific Reports, vol. 4, no. 6176, 2014.
Development of a tube-shaped ionic polymer-metal composite actuator with integrated sensing Masters Thesis
University of Nevada, Reno, 2014.
Monolithic IPMC fins for propulsion and maneuvering in bio-inspired underwater robotics Journal Article
In: IEEE Journal of Oceanic Engineering, vol. 39, no. 3, pp. 540 - 551, 2014.
Design, modeling, and control of nanopositioning systems Book
Springer, New York, 2014, ISBN: 3319066161.

Range-based control of dual-stage nanopositioning systems Journal Article
In: Review of Scientific Instruments, vol. 85, no. 4, pp. 045003 (6 pages), 2014.

Analog robust repetitive control for nanopositioning Proceedings Article
In: 19th World Congress of the International Federation of Automatic Control, 24-29 August 2014, Cape Town, South Africa (Forthcoming), 2014.
2013
Control of a Quadcopter Aerial Robot Using Optic Flow Sensing Masters Thesis
University of Nevada, Reno, Reno, Nevada, 2013.
Mechanical design and control for high-speed nanopositioning: serial-kinematic nanopositioners and repetitive control for nanofabrication Journal Article
In: IEEE Control Systems Magazine (In press), Special Issue on Dynamics and Control of Micro and Naoscale Systems, vol. 33, no. 6, pp. 86 – 105, 2013.

Unmanned aircraft systems in environmental science: cheaper, better, faster and more accessible large scale data collection to improve understanding of natural resources Proceedings Article
In: CABNR/NAES/UNCE Main Station - Field Day, 2013.

Augmented proportional-derivative control of a micro quadcopter Proceedings Article
In: ASME Dynamic Systems and Controls Conference, 2013.

The effects of electrode surface morphology on the actuation performance of IPMC Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, 2013.
An IPMC-enabled bio-inspired bending/twisting fin for underwater applications Journal Article
In: Smart Mater. Struct., vol. 22, pp. 014003, 2013.
An experimental comparison of PI, inversion, and damping control for high performance nanopositioning Proceedings Article
In: American Control Conference, 2013.
Matlab tricks and tips Journal Article
In: IEEE Cont. Syst. Mag., vol. 33, no. 4, pp. 39 – 40, 2013.

Precision Control of Ionic Polymer-Metal Composite Actuators Proceedings Article
In: 7th World Congress on Biomimetics, Artificial Muscles and Nano-Bio (BAMN2013), 2013.
Sectored tube-shaped ionic polymer-metal composite actuator with integrated sensor Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems, September 19-21, Snowbird, Utah, USA, 2013.
2012
University of Nevada, Reno, Reno, Nevada, 2012.

Robust damping PI repetitive control for nanopositioning Proceedings Article
In: American Control Conference, 2012.
Dual-stage repetitive control with Prandtl-Ishlinskii hysteresis inversion for piezo-based nanopositioning Journal Article
In: Mechatronics, vol. 22, pp. 271 – 281, 2012.

Invited Review: High-speed flexure-guided nanopositioning: mechanical design and control Issues Journal Article
In: Review of Scientific Instruments, vol. 83, no. 12, pp. 121101, 2012.

Accounting for hysteresis in repetitive control design: nanopositioning example Journal Article
In: Automatica, vol. 48, no. 8, pp. 1751 – 1758, 2012.
Overcoming the speed limitations of constant-force mode AFM Proceedings Article
In: Seeing at the Nanoscale 2012, 2012.
Design and control of a three-axis serial-kinematic high-bandwidth nanopositioner Journal Article
In: IEEE/ASME Trans. Mechatronics, vol. 17, no. 2, pp. 356 – 369, 2012.
Flexure design using metal matrix composite materials: nanopositioning example Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA), 2012.

Physics based electromechanical model of IPMC considering various underlying currents Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, 2012.
Spatial-temporal control of dual-stage nanpositioners Proceedings Article
In: IEEE Control and Decision Conference, 2012.

Teaching the difference between stiffness and damping Journal Article
In: IEEE Cont. Syst. Mag., vol. 32, no. 4, pp. 95 – 97, 2012.

Introduction to part 2 of the themed articles on ionic polymer-metal composites Journal Article
In: International Journal of Smart and Nano Materials, vol. 3, no. 4, pp. 243, 2012.

Introduction to the themed articles on ionic polymer-metal composites Journal Article
In: International Journal of Smart and Nano Materials, vol. 3, no. 3, pp. 183 – 187, 2012.

An experiment for teaching students about control at the nanoscale Journal Article
In: IEEE Cont. Syst. Mag., vol. 32, no. 1, pp. 66–68, 2012.

Short online videos to excite and engage students about control Journal Article
In: IEEE Cont. Syst. Mag., vol. 32, no. 2, pp. 70 – 71, 2012.

The NSF GK-12 E-Fellowship Program: Toward Energy-Aware STEM Leaders for the 21st Century Proceedings Article
In: 2012 SMTI National Conference, 2012.

Integrated sensing for IPMC actuators using strain gages for underwater applications Journal Article
In: IEEE/ASME Trans. Mechatronics, vol. 17, no. 2, pp. 345 – 355, 2012.

Mitigating IPMC back relaxation through feedforward and feedback control of patterned electrodes Journal Article
In: Smart Mater. Struct., vol. 21, pp. 085002 (12 pages), 2012.
2011

Repetitive control for hysteretic systems: theory and application in piezo-based nanopositioners PhD Thesis
Univesity of Nevada, Reno, 2011.
Design and characterization of sectored (patterned) IPMC actuators for propulsion and maneuvering in bio-inspired underwater systems Masters Thesis
University of Nevada, Reno, Reno, Nevada, 2011.
Repetitive control design for piezoelectric actuators Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), 2011.
Cyclic Energy harvesting from pyroelectric materials Journal Article
In: IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, vol. 58, no. 1, pp. 10–17, 2011.

Electrically responsive stiffness change of IPMCs Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), 2011.

A compact ultra-fast vertical nanopositioner for improving SPM scan speed Journal Article
In: Rev. Sci. Instr., vol. 82, pp. 123703, 2011.
Design and fabrication of an automatic nano tool-tip exchanger for scanning probe microscopy Proceedings Article
In: ASME 2011 International Manufacturing Science and Engineering Conference (MSEC2011), 2011.
Modeling and designing IPMCs for twisting motion: electromechanical and mechanoelectrical transduction Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, 2011.
Characterization of sectored-electrode IPMC-based propulsors for underwater locomotion Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), Scottsdale, Arizona, September 18–21, 2011, pp. 171–180, 2011.
A twistable artificial muscle for underwater robotic applications Proceedings Article
In: US-Korea Summit on Science and Engineering (UKC), 2011.

A twistable ionic polymer-metal composite artificial muscle for marine applications Journal Article
In: Marine Technology Society Journal, vol. 45, no. 4, pp. 83 – 98, 2011.

Mitigating IPMC back-relaxation effect using multi-input control Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), 2011.
2010
Application of an Inverse-Hysteresis Iterative Control Algorithm for AFM Fabrication Masters Thesis
University of Nevada, Reno, Reno, Nevada, 2010.
University of Nevada, Reno, Reno, Nevada, 2010.
Dual-stage repetitive control for high-speed nanopositioning Proceedings Article
In: IFAC Symposium on Mechatronic Systems and ASME Dynamic Systems and Control Conference (DSCC), Invited session on Micro- and Nanoscale Dynamics and Control, 2010.

Sectored-electrode IPMC actuator for bending and twisting motion Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, pp. 764221, 2010.

Development of dimensionally scalable IPMC materials Proceedings Article
In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Invited session on EAP, 2010.

Tracking control of oscillatory motion in IPMC actuators for underwater applications Proceedings Article
In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Invited session on EAP, 2010.

Bridging the gap between conventional and video-speed scanning probe microscopes Journal Article
In: Ultramicroscopy, vol. 110, no. 9, pp. 1205 – 1214, 2010.

Ultra-fast dual-stage vertical positioning for high performance SPMs Proceedings Article
In: American Control Conference, Special Invited Session on Advances in Actuation for Nanopositioning and Scanning Probe Systems, pp. 4975 – 4980, 2010.
High performance nanopositioning with integrated strain and force feedback Proceedings Article
In: IFAC Symposium on Mechatronic Systems and ASME Dynamic Systems and Control Conference (DSCC), Invited Session on Micro- and Nanoscale Dynamics and Control, 2010.

Integrated strain and force feedback for high performance control of piezoelectric actuators Journal Article
In: Sensors and Actuators: A. Physical, vol. 161, no. 1-2, pp. 256 – 265, 2010.

Measurement and control for high-speed sub-atomic positioning in scanning probe microscopes Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA2010), Invited workshop, May 3-8, 2010.

Design, characterization, and control of a monolithic three-axis high-bandwidth nanopositioning stage Proceedings Article
In: American Control Conference, Special Invited Session on Advances in Actuation for Nanopositioning and Scanning Probe Systems, pp. 4949 – 4956, 2010.

Emerging challenges of microactuators for nanoscale positioning, assembly, and manipulation Journal Article
In: ASME Journal of Manufacturing Science and Engineering, Special Issue on Nanomanufacturing, vol. 132, no. 3, pp. 030917 (16 pages), 2010.
A thermally-activated modular SPM probe for mulitfunctional applications Proceedings Article
In: ASME International Manufacturing Science and Engineering Conference, 2010.

IPMC: recent progress in modeling, manufacturing, and new applications Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, 2010.
Performance of thin piezoelectric materials for pyroelectric energy harvesting Journal Article
In: Journal of Intelligent Material Systems and Structures, Special issue of a selection of papers from the first ASME Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS 2008) Symposium , vol. 21, pp. 243 – 249, 2010.

Teaching modules on modeling and control of piezoactuators for undergraduate dynamics and control and mechatronics courses Journal Article
In: IEEE Trans. Education, vol. 53, no. 3, pp. 372 – 383, 2010.
2009

Frequency-weighted feedforward control for dynamic compensation in ionic polymer-metal composite actuators Journal Article
In: Smart Materials and Structures, vol. 18, no. 12, pp. 125016 (11 pages), 2009.
Repetitive control with Prandtl-Ishlinskii hysteresis inverse for piezo-based nanopositioning Proceedings Article
In: American Control Conference, Invited Session on Advances in Control of Nanopositioning and SPM Systems, pp. 301 - 306, 2009.
Design and analysis of discrete-time repetitive control for scanning probe microscopes Journal Article
In: ASME J. Dyn. Syst. Meas. and Cont., vol. 131, pp. 061103 (12 pages), 2009.

A review of feedforward control approaches in nanopositioning for high speed SPM Journal Article
In: ASME J. Dyn. Syst. Meas. and Cont., vol. 131, no. 6, pp. 061101 (19 pages), 2009.

High-speed serial-kinematic AFM scanner: design and drive considerations Journal Article
In: Asian Journal of Control, Special issue on Advanced Control Methods for Scanning Probe Microscopy Research and Techniques, vol. 11, no. 2, pp. 144 – 153, 2009.
A novel multifunctional SPM probe with modular quick-change tips for fully automated probe-based nanofabrication Proceedings Article
In: Proceedings of NSF Engineering Research and Innovation Conference, 2009.

Feedforward control of piezoactuators in atomic force microscope systems: inversion-based compensation for dynamics and hysteresis Journal Article
In: IEEE Cont. Syst. Mag., Special Issue on Hysteresis, vol. 29, no. 1, pp. 70 – 82, 2009.

Iterative and feedback control for hysteresis compensation in SMA Journal Article
In: ASME J. Dyn. Syst. Meas. and Cont., vol. 131, pp. 014502 (6 pages), 2009.
2008
Fabrication and Integrated Feedforward and Feedback Control of Ionic Polymer-Metal Composite Actuators Masters Thesis
Virginia Commonwealth University, Richmond, Virginia, 2008.

Modeling and control of smart actuators: integrating nano/bio technology into the ME curriculum Proceedings Article
In: ASEE Annual Conference and Exposition, 2008.

Low-cost noncontact infrared sensors for sub-micro-level position measurement and control Journal Article
In: IEEE/ASME Trans. on Mechatronics, vol. 13, no. 6, pp. 700 – 709, 2008.
Application of Feedforward Dynamics Compensation in Ionic-Polymer Metal Composite Actuators Proceedings Article
In: SPIE Smart Structures and Materials and NDE for Health Monitoring and Diagnostics Conference, pp. 69270F-1 – 69270F-12, 2008.
Hysteresis inverse iterative learning control of piezoactuators in AFM Proceedings Article
In: 17th IFAC World Congress, Invited Session on Dynamics and Control of Micro- and Nanoscale Systems, 2008.
Discrete-time phase compensated repetitive control for piezoactuators in scanning probe microscopes Proceedings Article
In: ASME Dynamic Systems and Control Conference, Invited Session on Dynamics Modeling and Control of Smart Actuators, pp. 1325 – 1332, 2008.

Charge drives for scanning probe microscope positioning stages Journal Article
In: Ultramicroscopy, vol. 108, pp. 1551–1557, 2008.
Evaluation of charge drives for scanning probe microscope positioning stages Proceedings Article
In: American Control Conference, Invited session on Advanced Mechanism Design, Modeling, and Control of SPMs, pp. 2028 – 2033, 2008.

Optimal seek-trajectory design for dual-stage systems Journal Article
In: IEEE Trans. Cont. Sys. Tech., vol. 16, no. 5, pp. 869 – 881, 2008.
Energy harvesting via pyroelectric effect using PZT Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems, 2008.
High-speed serial-kinematic AFM scanner: design and drive considerations Proceedings Article
In: American Control Conference, Invited Session on Modeling and Control of SPM, pp. 3188 – 3193, 2008.
Design and fabrication of a multifunctional scanning probe with integrated tip changer for fully automated nanofabrication Proceedings Article
In: 23rd ASPE Anual Meeting and 12th ICPE, 2008.
2007
A biaxial shape memory alloy actuated cell/tissue stretching system Proceedings Article
In: ASME International Mechanical Engineering Congress and Exposition (IMECE), 2007.
Hysteresis compensation for high-precision positioning of a shape memory alloy actuator using integrated iterative-feedforward and feedback inputs Proceedings Article
In: American Control Conference, pp. 4246 – 4253, 2007.
A collaborative approach to teach modeling and control of smart actuators in the mechanical engineering curriculum Proceedings Article
In: ASME International Mechanical Engineering Congress and Exposition, 2007.

Feedback-linearized inverse feedforward for creep, hysteresis, and vibration compensation in AFM piezoactuators Journal Article
In: IEEE Trans. Cont. Syst. Tech., vol. 15, no. 5, pp. 927 – 935, 2007.
2006
Precise positioning of a shape memory alloy actuator using iterative control Proceedings Article
In: Actuator 2006, pp. 467 – 470, 2006.

Optimal seek-trajectory design for dual-stage systems Proceedings Article
In: American Control Conference, pp. 606 – 612, 2006.
Hysteresis characterization using charge-feedback control for LIPCA a device Proceedings Article
In: SPIE Smart Structures and Materials and NDE for Health Monitoring and Diagnostics, 2006.

Design of hysteresis-compensating iterative learning control for piezo positioners: application to atomic force microscopes Journal Article
In: Mechatronics, vol. 16, no. 3--4, pp. 141 – 158, 2006.
The design of a high-voltage charge-feedback piezo-amplifier Proceedings Article
In: Actuator 2006 Conference, pp. 353 – 355, 2006.
2004
Control issues in high-speed AFM for biological applications: collagen imaging example Journal Article
In: Asian Journal of Control, Special issue on Advances in Nanotechnology Control, vol. 6, no. 2, pp. 164-178, 2004.
University of Washington, 2004.
Iterative learning control of piezo positioners for long-range SPM-based nanofabrication Proceedings Article
In: The 3rd IFAC Symposium on Mechatronic Systems, 2004.
2003

Iterative feedforward compensation of hysteresis in piezo positioners Proceedings Article
In: IEEE 42nd Conference on Decision and Controls, Invited session on Nanotechnology: Control Needs and Related Perspectives, pp. 2626 - 2631, 2003.
2002
Continuous- and discrete-time state-space modeling (a contributed chapter) Book Chapter
In: Bishop, R. (Ed.): The CRC Mechatronics Handbook, pp. 40-54, The CRC Press, 2002.
Hysteresis, creep, and vibration compensation for piezoactuators: feedback and feedforward control Proceedings Article
In: The 2nd IFAC Conference on Mechatronic Systems, Invited session on Smart Materials and Structures, pp. 283-289, 2002.
1999
The design of a mobile robot kit for mechatronics courses Masters Thesis
University of Utah, Salt Lake City, Utah, 1999.
1998
Experimental and theoretical results in output-trajectory redesign for flexible structures Journal Article
In: ASME J. Dyn. Syst., Meas., and Control, vol. 120, no. 4, pp. 456-461, 1998.
