




2024

Information-Theoretic Bayesian Inference for Multi-Agent Localization and Tracking of an RF Target with Unknown Waveform Journal Article
In: ASME J. Dyn. Syst. Meas. and Cont., Special Issue on Data-Driven Modeling and Control of Dynamical Systems (https://doi.org/10.1115/1.4066453), vol. 146, iss. 6, pp. 061104, 2024.
2023

A Tutorial on Real-Time Computing Issues for Control Systems Proceedings Article
In: American Control Conference, San Diego, CA, May 31-June 2, 2023.
2022
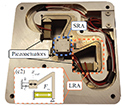
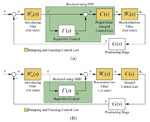
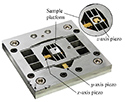
Low-Coupling Hybrid Parallel-Serial-Kinematic Nanopositioner with Nonorthogonal Flexure: Nonlinear Design and Control Journal Article
In: IEEE/ASME Transactions on Mechatronics, vol. 27, iss. 5, pp. 3683-3693, 2022.
Discrete Input-Output Sliding-Mode Control with Range Compensation: Application in High-Speed Nanopositioning Proceedings Article
In: American Control Conference, June 8-11, 2022.

Long-Range Low-Coupling Dual-Stage Nanopositioning: Design and Control for High-Speed Atomic Force Microscopy PhD Thesis
2022.
2021

Closed-loop Range-Based Control of Dual-Stage Nanopositioning Systems Journal Article
In: IEEE/ASME Transactions on Mechatronics, vol. 26, iss. 3, pp. 1412-1421, 2021.
![The American Control Conference [Conference report]](http://www.kam.k.leang.com/academics/wp-content/uploads/2021/10/2021_ACCreport.jpg)
The American Control Conference [Conference report] Journal Article
In: IEEE Control Systems Magazine, vol. 41, no. 1, pp. 82-86, 2021.
2020

Decentralized Multi-Agent Information-Theoretic Control for Target Estimation and Localization: Finding Chemical Leaks Journal Article
In: International Journal of Robotics Research, vol. 39, no. 13, pp. 1525 - 1548, 2020.
Image-based Estimation, Planning, and Control for High-speed Flying through Multiple Openings Journal Article
In: International Journal of Robotics Research, Vol. 39, No. 9, pp. 122-1137, 2020, 2020.

Decentralized multi-agent information theoretic target localization and estimation: finding and predicting chemical gas leaks PhD Thesis
University of Utah, 2020.
Analysis and Experimental Comparison of Range-based Control for Dual-Stage Nanopositioners Journal Article
In: Mechatronics, Vol. 69, pp. 102371, 2020, 2020.

Image-Based Estimation, Planning, and Control of Cable-Suspended Payload for Package Delivery Journal Article
In: IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2698-2705, 2020.

Improved Linear Quadratic Tracking Control of Dual-Stage Nanopositioning Systems through a Cascading Structure Conference
American Control Conference (Accepted, forthcoming), 2020.

Modeling and Control of In-Ground-Effect on Rotorcraft Unmanned Aerial Vehicles PhD Thesis
University of Utah, 2020.

Multi-time Scale Control of Dual-Stage Nanopositioning Systems Proceedings Article
In: 21st World Congress of the International Federation of Automatic Control (Under review), Berlin, Germany, July 12-17,, 2020.
2019

Dynamic and Aggressive Image-Based Flying in GPS-Denied Environments: Estimation, Motion Planning, and Control PhD Thesis
University of Utah, 2019.

Multi-rotor In-Ground-Effect Modeling and Adaptive Nonlinear Disturbance Observer for Closed-loop UAV Control Journal Article
In: ASME J. Dyn. Syst. Meas. and Cont., Special Issue: "Autonomous Mobile Systems" in Memory of Professor J. Karl Hedrick, vol. 141, pp. 071013 (11 pages), 2019.
Robust Sliding-Mode Control for Dual-Stage Nanopositioning Systems Proceedings Article
In: American Control Conference (Accepted, forthcoming), Invited session: Precision Mechatronics, Philadelphia, PA, July 10-12, 2019, 2019.
2018

Nonlinear Vision-based Observer for Visual Servo Control of an Aerial Robot in GPS-denied Environments Journal Article
In: ASME J. Mechanisms and Robotics, vol. 10, no. 6, pp. 061018, 2018.

Development of a 3-DOF tripedal stick-slip microrobotic mobile platform for unconstrained, omnidirectional sample positioning Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Atlanta, GA, October 1-3, 2018.
2017
Spatial filter design for dual-stage systems Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Tysons Corner, Virginia, USA, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.

Position and Linear Velocity Estimation for Position-Based Visual Servo Control of an Aerial Robot in GPS-Denied Environments Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Tysons Corner, Virginia, USA, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.

Mutual Information Control for Target Acquisition: A Method to Localize a Gas/Chemical Plume Source Using a Mobile Sensor Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC) Tyson Corner, Virginia, USA, October 11-13, 2017, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.

Modeling and Adaptive Nonlinear Disturbance Observer for Closed-Loop Control of In-Ground-Effects on Multi-rotor UAVs Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC) Tyson Corner, Virginia, USA, October 11-13, 2017, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.
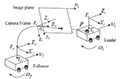
Adaptive Vision-Based Leader- Follower Formation Control of Mobile Robots Journal Article
In: IEEE Transactions on Industrial Electronics, vol. 64, no. 4, pp. 2893 - 2902, 2017.

Repetitive Control Design and Implementation for Periodic Motion Tracking in Aerial Vehicles Proceedings Article
In: American Control Conference May 24-26, Seattle, WA, 2017, 2017.
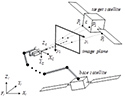
Eye-in-Hand Tracking Control of a Free-Floating Space Manipulator Journal Article
In: IEEE Transactions on Aerospace and Electronic Systems, vol. 53, no. 4, pp. 1855 - 1865, 2017.
2016

Adaptive Repetitive Visual-Servo Control of a Low-Flying Unmanned Aerial Vehicle with an Uncalibrated High-Flying Camera Proceedings Article
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 9-14, 2016, Daejeon, Korea, pp. 4258 - 4265, 2016.

High-speed AFM through non-raster scanning and high speed actuation Proceedings Article
In: Biophysical Society Annual Meeting, Los Angeles, CA, February 27 - March 2. Poster presentation., 2016.
Tracking control for nanopositioning systems, in Fundamentals and Applications of Nanopositioning Technologies Book Chapter
In: Ru, C.; Liu, X.; Sun, Y. (Ed.): Fundamentals and Applications of Nanopositioning Technologies, Springer, 2016.
2015
Low-order damping and tracking control for scanning probe systems Journal Article
In: Mechatronics, Frontiers in Mechanical Engineering, vol. 1, pp. Article 14, 2015.
2014
Design, modeling, and control of nanopositioning systems Book
Springer, New York, 2014, ISBN: 3319066161.

Analog robust repetitive control for nanopositioning Proceedings Article
In: 19th World Congress of the International Federation of Automatic Control, 24-29 August 2014, Cape Town, South Africa (Forthcoming), 2014.
2013

Augmented proportional-derivative control of a micro quadcopter Proceedings Article
In: ASME Dynamic Systems and Controls Conference, 2013.
Mechanical design and control for high-speed nanopositioning: serial-kinematic nanopositioners and repetitive control for nanofabrication Journal Article
In: IEEE Control Systems Magazine (In press), Special Issue on Dynamics and Control of Micro and Naoscale Systems, vol. 33, no. 6, pp. 86 – 105, 2013.
2012

Robust damping PI repetitive control for nanopositioning Proceedings Article
In: American Control Conference, 2012.

Accounting for hysteresis in repetitive control design: nanopositioning example Journal Article
In: Automatica, vol. 48, no. 8, pp. 1751 – 1758, 2012.
2011

Repetitive control for hysteretic systems: theory and application in piezo-based nanopositioners PhD Thesis
Univesity of Nevada, Reno, 2011.
Repetitive control design for piezoelectric actuators Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), 2011.

Mitigating IPMC back-relaxation effect using multi-input control Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), 2011.
2010
University of Nevada, Reno, Reno, Nevada, 2010.
Dual-stage repetitive control for high-speed nanopositioning Proceedings Article
In: IFAC Symposium on Mechatronic Systems and ASME Dynamic Systems and Control Conference (DSCC), Invited session on Micro- and Nanoscale Dynamics and Control, 2010.

Ultra-fast dual-stage vertical positioning for high performance SPMs Proceedings Article
In: American Control Conference, Special Invited Session on Advances in Actuation for Nanopositioning and Scanning Probe Systems, pp. 4975 – 4980, 2010.

Tracking control of oscillatory motion in IPMC actuators for underwater applications Proceedings Article
In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Invited session on EAP, 2010.

Measurement and control for high-speed sub-atomic positioning in scanning probe microscopes Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA2010), Invited workshop, May 3-8, 2010.

Bridging the gap between conventional and video-speed scanning probe microscopes Journal Article
In: Ultramicroscopy, vol. 110, no. 9, pp. 1205 – 1214, 2010.

Design, characterization, and control of a monolithic three-axis high-bandwidth nanopositioning stage Proceedings Article
In: American Control Conference, Special Invited Session on Advances in Actuation for Nanopositioning and Scanning Probe Systems, pp. 4949 – 4956, 2010.

Integrated strain and force feedback for high performance control of piezoelectric actuators Journal Article
In: Sensors and Actuators: A. Physical, vol. 161, no. 1-2, pp. 256 – 265, 2010.
2009
Repetitive control with Prandtl-Ishlinskii hysteresis inverse for piezo-based nanopositioning Proceedings Article
In: American Control Conference, Invited Session on Advances in Control of Nanopositioning and SPM Systems, pp. 301 - 306, 2009.
Design and analysis of discrete-time repetitive control for scanning probe microscopes Journal Article
In: ASME J. Dyn. Syst. Meas. and Cont., vol. 131, pp. 061103 (12 pages), 2009.
2008
Discrete-time phase compensated repetitive control for piezoactuators in scanning probe microscopes Proceedings Article
In: ASME Dynamic Systems and Control Conference, Invited Session on Dynamics Modeling and Control of Smart Actuators, pp. 1325 – 1332, 2008.

Low-cost noncontact infrared sensors for sub-micro-level position measurement and control Journal Article
In: IEEE/ASME Trans. on Mechatronics, vol. 13, no. 6, pp. 700 – 709, 2008.
2007

Feedback-linearized inverse feedforward for creep, hysteresis, and vibration compensation in AFM piezoactuators Journal Article
In: IEEE Trans. Cont. Syst. Tech., vol. 15, no. 5, pp. 927 – 935, 2007.
2004
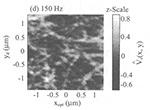
Control issues in high-speed AFM for biological applications: collagen imaging example Journal Article
In: Asian Journal of Control, Special issue on Advances in Nanotechnology Control, vol. 6, no. 2, pp. 164-178, 2004.
2002
Continuous- and discrete-time state-space modeling (a contributed chapter) Book Chapter
In: Bishop, R. (Ed.): The CRC Mechatronics Handbook, pp. 40-54, The CRC Press, 2002.
Hysteresis, creep, and vibration compensation for piezoactuators: feedback and feedforward control Proceedings Article
In: The 2nd IFAC Conference on Mechatronic Systems, Invited session on Smart Materials and Structures, pp. 283-289, 2002.
