




Robotics is a field that combines mechanical engineering, electrical engineering and computer science in the design, construction, operation, and application of intelligent machines or virtual artificial agents with the goal of helping society. The robotics research in the DARC Lab focuses on the following topics:
- Design and modeling of robotic systems
- A micro spherical rolling and flying robot [PDF]
Christopher J. Dudley, Alex Woods, Kam K. Leang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), September 28 – October 03, Hamburg, Germany, 2015.
- Actuation (IPMC-based robotic systems)
- Monolithic IPMC fins for propulsion and maneuvering in bio-inspired underwater robotics
J. J. Hubbard, M. Fleming, V. Palmre, D. Pugal, K. J. Kim, K. K. Leang
IEEE Journal of Oceanic Engineering, 39 (3), pp. 540 – 551, 2014 [PDF] - An IPMC-enabled bio-inspired bending/twisting fin for underwater applications
V. Palmre, M. Fleming, J. J. Hubbard, D. Pugal, S. Kim, K. J. Kim, K. K. Leang
Smart Mater. Struct., 22, pp. 014003, 2013. - Frequency-weighted feedforward control for dynamic compensation in ionic polymer-metal composite actuators
Y. Shan, K. K. Leang
Smart Materials and Structures, 18 (12), pp. 125016 (11 pages), 2009.
- Monolithic IPMC fins for propulsion and maneuvering in bio-inspired underwater robotics
- Collision avoidance (for ground and aerial robots)
- On-Board Model-Based Automatic Collision Avoidance: Application in Remotely Piloted Unmanned Aerial Vehicles [PDF]
Autonomous robots (In press), 2017. - Study of Improved Pilot Performance using Automatic Collision Avoidance for Tele-operated Unmanned Aerial Vehicles [PDF]
IEEE International Symposium on Safety, Security and Rescue Robotics, pp. 118-124, October 23-27, 2016, EPFL, Lausanne, Switzerland, 2016. - Stochastic automatic collision avoidance for tele-operated unmanned aerial vehicles [PDF]
Daman Bareiss, Jur van den Berg, Kam K. Leang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), September 28 – October 03, Hamburg, Germany, 2015.
- On-Board Model-Based Automatic Collision Avoidance: Application in Remotely Piloted Unmanned Aerial Vehicles [PDF]
- Tracking and position control
- Control of a quadcopter aerial robot using optic flow sensing
M. Brandon Hurd, M.S. Thesis, December 2013, University of Nevada, Reno [ PDF ] - Augmented proportional-derivative control of a micro quadcopter
N. L. Johnson and K. K. Leang
ASME Dynamic Systems and Controls Conference, Stanford University, Palo Alto, CA., October 21-23, 2013
- Control of a quadcopter aerial robot using optic flow sensing
Publications related to robotics:
2025
Rotorcraft in-ground effect models in axial and forward flight Journal Article
In: Aerospace Science and Technology, vol. 156, pp. 109748, 2025.
2024

Rapid Airborne Gas-plume Mapping and Source Localization with Feedforward Gas-sensor Dynamics Compensation Journal Article
In: ASME Letters in Dynamic Systems and Control, vol. 4, no. 4, pp. 041002, 2024.

Magnetically-actuated Endoluminal Soft Robot with Electroactive Polymer Actuation for Enhanced Gait Performance Journal Article
In: ASME J. Mechanisms and Robotics (In press), vol. 16, no. 10, pp. 104503, 2024.

Information-Theoretic Bayesian Inference for Multi-Agent Localization and Tracking of an RF Target with Unknown Waveform Journal Article
In: ASME J. Dyn. Syst. Meas. and Cont., Special Issue on Data-Driven Modeling and Control of Dynamical Systems (https://doi.org/10.1115/1.4066453), vol. 146, iss. 6, pp. 061104, 2024.
2023

Engineered IPMC Sensors: Modeling, Characterization, and Application towards Wearable Postural-tactile Measurement Journal Article
In: Smart Materials and Structures, vol. 33, pp. 015035 (12 pages), 2023.
2022

Information-Based Mobile Sensor Network Localization and Tracking of an Uncooperative Target Proceedings Article
In: IEEE Military Communications Conference (MILCOM), November 28 - December 2, Rockville, MD, USA, pp. 490-495, 2022.
Information-Based Mobile Sensor Network Coordination for Localizing and Tracking of an Uncooperative Target Masters Thesis
2022.
Ionic Polymer-Metal Composite Sensors and Actuators for Wearable and Medical Devices Proceedings Article
In: 6th International Conference on Active Materials and Soft Mechatronics (AMSM 2022), October 26-29, 2022, Georgia Tech, Atlanta, Georgia, USA, 2022.

Feedforward Mutual-Information Anomaly Detection: Application to Autonomous Vehicles Journal Article
In: ASME Journal of Autonomous Vehicles and Systems, vol. 2, iss. 4, no. 041003 (7 pages), 2022.

Locomotion and Steering of a Magnetic-electroactive Endoluminal Soft Robot PhD Thesis
2022.
Bayesian Find-and-Consume Strategy for Mobile Robotic Sensor Networks: Estimating and Localizing Multiple Gas Leaks Masters Thesis
2022.
2021

Manufacturing for the masses: a novel concept for consumer 3D printer networks in the context of crisis relief Journal Article
In: Advanced Intelligent Systems, pp. 202100121, 2021.
The Effect of Surface Roughness on Quasi-Steady in-Ground Effect for Multirotor Aerial Vehicles Masters Thesis
University of Utah, 2021.
2020

Autonomous Light Assessment Drone for Dark Skies Studies Proceedings Article
In: ASME Dynamic Systems and Control Conference (Virtual conference), October 4-7, 2020, 2020.

Decentralized Multi-Agent Information-Theoretic Control for Target Estimation and Localization: Finding Chemical Leaks Journal Article
In: International Journal of Robotics Research, vol. 39, no. 13, pp. 1525 - 1548, 2020.

Decentralized multi-agent information theoretic target localization and estimation: finding and predicting chemical gas leaks PhD Thesis
University of Utah, 2020.

Image-Based Estimation, Planning, and Control of Cable-Suspended Payload for Package Delivery Journal Article
In: IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2698-2705, 2020.

Modeling and Control of In-Ground-Effect on Rotorcraft Unmanned Aerial Vehicles PhD Thesis
University of Utah, 2020.
2019
Assembly Planning using a Multi-Arm System for Polygonal Furniture Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019, 2019.

Body-pose Bayesian estimation of a snow-avalanche victim: a method for first responders and/or aerial robots to quickly locate a buried victim Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019, 2019.
Coordinated Bayesian-based Bio-Inspired Plume Source Term Estimation and Source Seeking for Mobile Robots Journal Article
In: IEEE Transactions on Robotics (DOI: 10.1109/TRO.2019.2912520), vol. 35, no. 4, pp. 967-986, 2019.

Dynamic and Aggressive Image-Based Flying in GPS-Denied Environments: Estimation, Motion Planning, and Control PhD Thesis
University of Utah, 2019.

Magneto-electroactive Endoluminal Soft Robots Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019 (Accepted, forthcoming), 2019.

Gaussian-based Kernel for Multi-Agent Aerial Chemical-Plume Mapping Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019 (Accepted, forthcoming), 2019.
A New Quasi-steady In-Ground Effect Model Rotorcraft Unmanned Aerial Vehicles Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019, 2019.

Chemical-source localization using a swarm of decentralized unmanned aerial vehicles for urban/suburban environments Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019, 2019.

Autonomous Chemical Sensing Aerial Robot for Urban/Suburban Environmental Monitoring Journal Article
In: IEEE Systems Journal, Vol. 13, No. 3, pp. 3524 - 3535, 2019.

Guest Editorial Focused Section on Soft Actuators, Sensors, and Components (SASC) Journal Article
In: IEEE/ASME Transactions on Mechatronics, Focused Section, Vol. , vol. 24, no. 1, pp. 1-4, 2019.
2018

Nonlinear Vision-based Observer for Visual Servo Control of an Aerial Robot in GPS-denied Environments Journal Article
In: ASME J. Mechanisms and Robotics, vol. 10, no. 6, pp. 061018, 2018.
Design and control of a micro aerial vehicle powered with resonant inductive wireless power transfer Masters Thesis
University of Utah, 2018.

3D printing, performance characterization, and machine learning control of ionic polymer-metal composite actuators with applications in soft robotics PhD Thesis
University of Utah, 2018.
Near-optimal area coverage path planning for an energy constrained autonomous mobile robot: application to autonomous aerial chemical sensing Masters Thesis
University of Utah, 2018.
Characterization, Modeling, and Feedforward Compensation of Gas Sensor Dynamics for Aerial Robot Chemical Plume Mapping and Swarm-based Localization Masters Thesis
University of Utah, 2018.

Modular design and control of a fully-actuated hexrotor for aerial manipulation applications Journal Article
In: ASME J. Mechanisms and Robotics, vol. 10, no. 4, pp. 041007, 2018.

In: Invited article to the Special Issue on Active Materials and Soft Mechatronics, International Journal of Smart and Nano Materials, vol. 8, no. 4, pp. 144-213, 2018.

Design, Modeling, and Analysis of Inductive Resonant Coupling Wireless Power Transfer for Micro Aerial Vehicles (MAVs) Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA), Brisbane Convention & Exhibition Centre, Australia, May 21-25, 2018, pp. 6104-6109, 2018.
Design, modeling, and gait control of a rolling quadruped (Roll-U-Ped) Masters Thesis
University of Utah, 2018.
2017

Position and Linear Velocity Estimation for Position-Based Visual Servo Control of an Aerial Robot in GPS-Denied Environments Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Tysons Corner, Virginia, USA, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.

Mutual Information Control for Target Acquisition: A Method to Localize a Gas/Chemical Plume Source Using a Mobile Sensor Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC) Tyson Corner, Virginia, USA, October 11-13, 2017, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.

Modeling and Adaptive Nonlinear Disturbance Observer for Closed-Loop Control of In-Ground-Effects on Multi-rotor UAVs Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC) Tyson Corner, Virginia, USA, October 11-13, 2017, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.

Guest Editorial: Focused Section on Advances in Soft Robotics Journal Article
In: International Journal of Intelligent Robotics and Applications, vol. 1, no. 2, pp. 121 - 123, 2017.
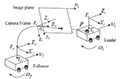
Adaptive Vision-Based Leader- Follower Formation Control of Mobile Robots Journal Article
In: IEEE Transactions on Industrial Electronics, vol. 64, no. 4, pp. 2893 - 2902, 2017.

Adaptive-Repetitive Visual-Servo Control of Low-Flying Aerial Robots via Uncalibrated High-Flying Cameras Journal Article
In: Journal of Nonlinear Science, Special issue on robotics: mechanics and control of locomotion, vol. 27, no. 4, pp. 1235-1256, 2017.

Fused Filament 3D Printing of Ionic Polymer-Metal Composites for Soft Robotics Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, Portland, OR, March 26-29, 2017., 2017.

Repetitive Control Design and Implementation for Periodic Motion Tracking in Aerial Vehicles Proceedings Article
In: American Control Conference May 24-26, Seattle, WA, 2017, 2017.
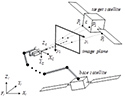
Eye-in-Hand Tracking Control of a Free-Floating Space Manipulator Journal Article
In: IEEE Transactions on Aerospace and Electronic Systems, vol. 53, no. 4, pp. 1855 - 1865, 2017.

3D-Printed Ionic Polymer-Metal Composite Soft Crawling Robot Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA), Sands Expo and Convention Centre, Marina Bay Sands in Singapore, May 29 - June 3, 2017, 2017.

A Unified Leader-Follower Scheme for Mobile Robots with Uncalibrated On-board Camera Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA), Sands Expo and Convention Centre, Marina Bay Sands in Singapore, May 29 - June 3, pp. 3792 - 3797, 2017.

On-Board Model-Based Automatic Collision Avoidance: Application in Remotely Piloted Unmanned Aerial Vehicles Journal Article
In: Autonomous robots, vol. 41, no. 7, pp. 1539-1554, 2017.
2016
Design and modeling of the dynamic underactuated flying-walking (DUCK) robot Masters Thesis
University of Utah, 2016.

Adaptive Repetitive Visual-Servo Control of a Low-Flying Unmanned Aerial Vehicle with an Uncalibrated High-Flying Camera Proceedings Article
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 9-14, 2016, Daejeon, Korea, pp. 4258 - 4265, 2016.

Study of Improved Pilot Performance using Automatic Collision Avoidance for Tele-operated Unmanned Aerial Vehicles Proceedings Article
In: 2016 IEEE International Symposium on Safety, Security and Rescue Robotics, October 23-27, 2016, EPFL, Lausanne, Switzerland, 2016.

University of Utah, 2016.

Dynamic underactuated flying-walking (DUCK) robot Proceedings Article
In: 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, pp. 3267 - 3274, 2016.
2015

Stochastic automatic collision avoidance for tele-operated unmanned aerial vehicles Proceedings Article
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), September 28 - October 02, pp. 4818-4825, Hamburg, Germany, 2015.

A Micro Spherical Rolling and Flying Robot Proceedings Article
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), September 28 - October 02, Hamburg, Germany, 2015.

Fused Filament Additive Manufacturing of Ionic Polymer-Metal Composite Soft Active 3D Structures Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), September 21-23, 2015 in Colorado Springs, Colorado., Colorado Springs, Colorado, 2015, (Jim Carrico and Nick Traeden were winners of the 2015 SMASIS Conf. Best Student Paper Award!).
2014
Monolithic IPMC fins for propulsion and maneuvering in bio-inspired underwater robotics Journal Article
In: IEEE Journal of Oceanic Engineering, vol. 39, no. 3, pp. 540 - 551, 2014.
2013
Control of a Quadcopter Aerial Robot Using Optic Flow Sensing Masters Thesis
University of Nevada, Reno, Reno, Nevada, 2013.

Unmanned aircraft systems in environmental science: cheaper, better, faster and more accessible large scale data collection to improve understanding of natural resources Proceedings Article
In: CABNR/NAES/UNCE Main Station - Field Day, 2013.

Augmented proportional-derivative control of a micro quadcopter Proceedings Article
In: ASME Dynamic Systems and Controls Conference, 2013.
An IPMC-enabled bio-inspired bending/twisting fin for underwater applications Journal Article
In: Smart Mater. Struct., vol. 22, pp. 014003, 2013.
2012

Integrated sensing for IPMC actuators using strain gages for underwater applications Journal Article
In: IEEE/ASME Trans. Mechatronics, vol. 17, no. 2, pp. 345 – 355, 2012.
2011
Design and characterization of sectored (patterned) IPMC actuators for propulsion and maneuvering in bio-inspired underwater systems Masters Thesis
University of Nevada, Reno, Reno, Nevada, 2011.

A twistable ionic polymer-metal composite artificial muscle for marine applications Journal Article
In: Marine Technology Society Journal, vol. 45, no. 4, pp. 83 – 98, 2011.
A twistable artificial muscle for underwater robotic applications Proceedings Article
In: US-Korea Summit on Science and Engineering (UKC), 2011.
1999
The design of a mobile robot kit for mechatronics courses Masters Thesis
University of Utah, Salt Lake City, Utah, 1999.